
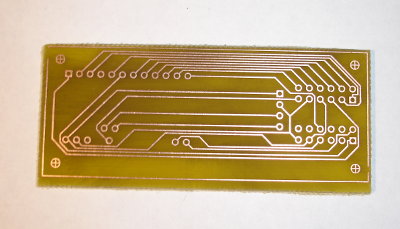
First I used LibreCAD to create a frame design. Inspired by Warthox but smaller. Then I printed it on copper clad board using an inkjet so I would have an accurate pattern to follow. I drilled all the rounded corners then cut the rest with a cut off wheel. I can’t easily express how much I hate cutting thick tough nasty fiberglass PCB.


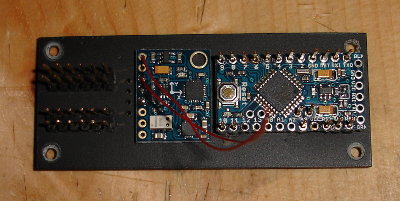
Next I used KiCad to create a circuit board for the electronic bits. Printed on a laser printer with magazine paper, ironed on, etched in my home-grown cupric chloride (love that stuff). This is a temporary design because I don’t have any 90 degree headers which means this one is going to be messy but I want to fly now.

Drilled and painted board.
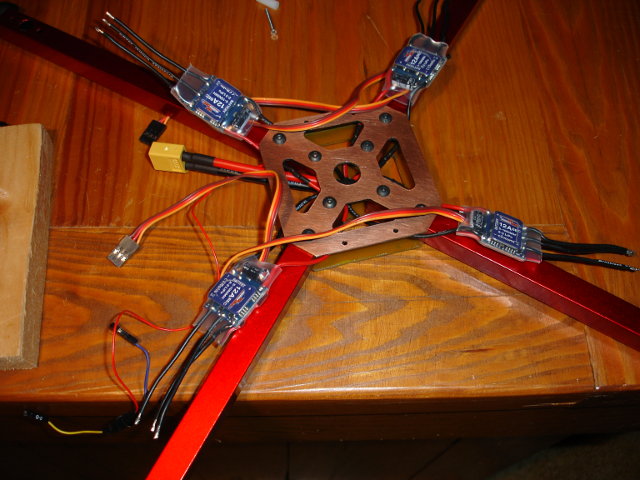
Power distribution. Silicon wire is heavy. I started with PVC insulated wire for testing and the quad was 10g lighter.

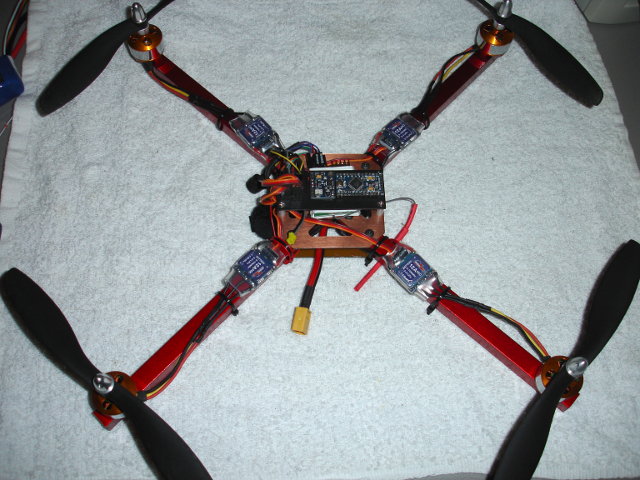
Putting together the final bits. I intentionally left the copper on the frame. It’s painted with enamel clearcoat to prevent oxidation.
As it flies today.
- Custom frame.
- Custom cut/drilled aluminum arms with custom blood red metallic candy paint. 1/2″ tube, 390mm motor to motor.
- BlueSeries 12A ESC flashed with simonk.
- Suppo 2208/17 1100kv motors.
- 8×4.5 Gemfan “carbon” props.
- Custom control board with Pro Mini, 10 DOF IMU (MPU6050, MS5611, HMC5883L).
- Battery warning buzzer made from the piezo buzzer out of an old V911 TX.
- Running MultiWii_shared from svn with my custom ArduinoUSBLinker firmware for re-flashing the ESC’s.
Weight is 396g without battery (was 385g with PVC wire

).
575g AUW with 2200 mAh 25C lipo. Around 20 minutes flight time.
3 responses to “Warthox inspired 400mm quad project”
” Running MultiWii_shared from svn ” and ‘ Custom control board with Pro Mini, 10 DOF IMU (MPU6050, MS5611, HMC5883L)”’
you can give me link to dowload ? thanks
Best to get from the MultiWii project. They have source code, downloads, etc here:
http://code.google.com/p/multiwii/
thanks chris.