-
Feit SEC3000/CAM “bricked”
Recently had to repair a bricked Fiet security camera. If too long of a WPA password is used it will cause a buffer overflow and the camera will crash which results in an endless boot-loop. There doesn’t appear to be a way to recover from this condition without getting serial access or access to the…

-
Adding a serial header to the Wyzecam V2
I have been meaning to try the open-source Intergenic bootloader for years and only just got around to it. This bootloader allows 1080p mode when using Dafang-Hacks. When messing with the bootloader it’s a good idea to have the serial connection ready for debugging or recovery so I added a header that is easy to…

-
Random phone IMEI calculator
Generate a fake random IMEI based on your real IMEI. This allows you to give your random IMEI to anyone without exposing your real IMEI. Useful for websites that decode the IMEI and display phone model information. No information is sent to this site for this calculation. It’s all done in your browser locally. You…

-
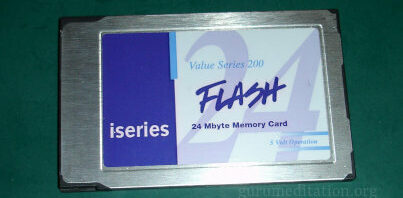
LeCroy Oscilloscope Memory Cards
This article is related to so-called “memory cards” (MC01) or SRAM cards. Mass storage cards (HD01) generally Just Work if your scope supports them. I want to attempt to solidify information surrounding the use of memory cards (MC01 SRAM) in older LeCroy oscilloscopes such as the LC series, DDA series, 93xx series, and 94xx series.…